A dancing robotic arm.
In class we will see how to create and implement the scene graph for a robotic arm. It is built from multiple identical components. It's movement should be hierarchical. For example, the top of the robot arm automatically moves when the middle part of the arm moves.

Moving car with headlight.
Click here for the animation
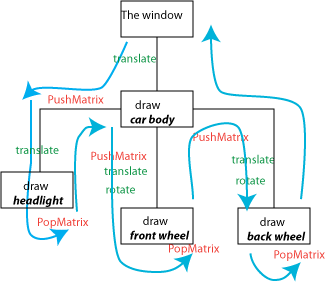
Simplified Scenegraph for Car
Process for Modeling Hierarchical Structure:
Object Design: Draw a rough picture of the object, labeling the size and location of all components as well as all angles or directions where movement will take place. Pay attention to where the pivot points are.
Scene Graph: Using your picture as a reference, draw a scene graph being careful to include all shapes and transformations. For example, a simplified scenegraph for the car is shown above. You should be more specific, i.e. give the value of the parameters for all of the transformations.
Implementation: Based on the scene graph, implement the object in OpenGL. User controls may be implemented either through key presses. Alternatively, you can have the motion be done automatically by a procedural algorithm. It is important to keep your code clean.